

We develop new experimental, numerical, and statistical learning tools to enhance the new research paradigm in understanding and controlling the Fluid-Structure Interaction problems. Under the vision of "i⁴ - FSI " ("intelligent", "informational", "integrative" and "interdisciplinary" fluid-structure interaction), we right now focus on the following research topics:
Flow-induced vibration
Physics-informed (and -informative) reinforcement learning for vortical flow control
Bio-inspired environmental sensing
Programmable metamaterial for aero/hydro morphing structures
Autonomy for multi-mode (aerial/aquatic) swarms
1. Experiments in the Intelligent Towing Tank (ITT)
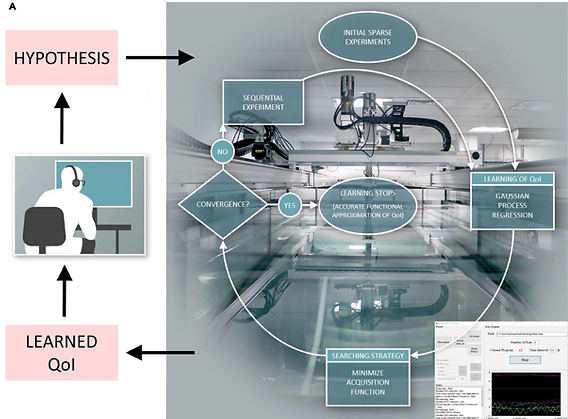
I developed and constructed a robotic intelligent towing tank (ITT) capable of learning complex fluid-structure dynamics. This is a vivid demonstration of J.C.R. Licklider's 50 years ago hope that “in not too many years, human brains and computing machines will be coupled together very tightly, and that the resulting partnership will think as no human brain has ever thought and process data in a way not approached by the information-handling machines we know”.
By implementing Gaussian process regression (GPR), deep reinforcement learning (Deep RL), and Physical-informed neural network (PINN) as the main learning algorithms. ITT is able to systemically explore and exploit the rigid cylinder VIV, flow control, and FSI system parameter estimation problems impracticable with the traditional approach of sequential hypothesis-testing and subsequent train-and-error execution.
Reference: Paper 01, Paper 02, Link01.
2. Vortex-Induced Vibrations of Flexible Structures
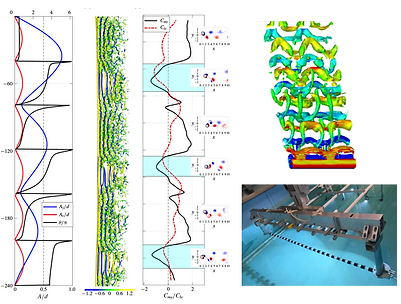
Vortex-induced vibrations (VIVs) of flexible structures, as a canonical FSI problem, has a considerable theoretical interest as it constitutes a fundamental nonlinear FSI system, while it is vital for the design of nearshore/offshore systems to avoid catastrophic fatigue damage. Till now, this problem still stays in the center of fluid mechanics investigations.
I developed an optical tracking experimental tool that can measure the detailed vibrational response and also allows the evaluation of the distributed forces acting along the structure. With ITT's systemic exploration of the rigid cylinder VIV hydrodynamics and detailed wake visualization by high-fidelity simulations, I assess the validity of underlying strip theory assumptions and shed some light on some fundamental physics properties in the flexible cylinder VIV modeling.
Reference: Paper 01, Paper 02, Paper 03, Paper 04, Paper 05, Paper 06.
3. Construction of Hydrodynamic Databases
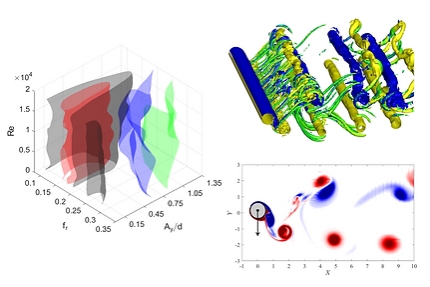
In order to map the hydrodynamic properties of the flexible structures undergoing complex motions, we rely on the construction of the comprehensive hydrodynamic databases using rigid body experiments with parametric inputs. These experiments can be useful to understand physics of the problem as well as to build a reduced-order model for real-life prediction with an adequate fidelity.
Taking advantage of the autonomy of the ITT sequential and adaptive experimental capability, I constructed several world-first hydrodynamic databases of the rigid cylinder with a combined-inline-and-crossflow motion, adding additional effects of Reynolds number, wake interference of upstream cylinder and different cylinder configurations.
Reference: Paper 02, Paper 02, Paper 03, Paper 04, Paper 05, Report 01.
The core of the biomimicry research is to integrate the bio-inspired concept with the fundamental scientific principles in order to solve the difficult engineering problems in a revolutionary way. As for the ocean, we observe various aerial/aquatic animals after million years of evolution, developed mesmerizing techniques to adapt harsh surroundings, maneuver, and navigate in unknown environments. Such observation can be transferred and integrated into the bio-inspired design for next generation aerial/aquatic vehicles. Link.
On the other hand, a well-controlled laboratory setting using devices capable of capture (re-enact) the key performance of the animal target can help us to better understand the animals' "secrecy" of locomotion and sensory ability that is difficult to study in the field. Link.

Reference: Paper 01, Paper 02, Paper 03.
5. Miscellaneous
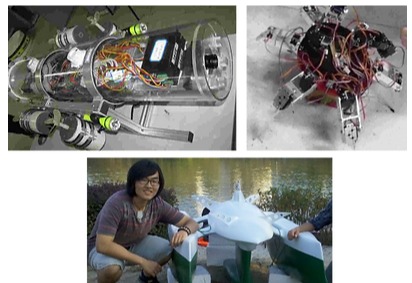
Apart from the fascinating Vortical fluid dynamics, from undergraduate, I have also been interested various non-conventional vehicles (robots), including my design of hexapods "Sun-Shine", autonomous underwater vehicle "Flying Fish" and the construction of a 2m renewable-energy-powered autonomous multi-hull sailboat "Harmony".
6. Deep sea intelligent bionic universal platform
Our project team is working on an innovative bionic fish project inspired by ocean fish. Our goal is to develop a new underwater robot that mimics fish's movement mechanism and propulsion structure. By intensely studying the movement of fish, we designed a bionic robot to mimic how they swim. We replaced the traditional purely rigid design with a rigid-flexible coupled bionic design. This design significantly improves the propulsion efficiency of the underwater robot, giving it a high degree of flexibility and excellent environmental adaptability.
In addition, our projects attach great importance to modular packaging technology with high cohesion and low coupling, deep-sea structural component design technology based on 3D printing, and multi-disciplinary cross-coupling optimization design technology. We also integrate intelligent control technology based on reinforcement learning, flexible sensing technology based on optics, and multi-faceted information processing technology. Combining these advanced technologies improves the robot's operating efficiency and supports its application in complex underwater environments. In the future, we will build a general underwater intelligent bionic platform based on this bionic robot. Through the reserved interface integration platform, various sensing and operation modules can be conveniently installed on this robot to achieve good maneuverability. Based on tight integration with the environment, we can formulate targeted tasks and efficiently complete secondary development and post-maintenance.

