MIT Class
I have TA'ed and lectured several courses at MIT (both undergraduate and graduate level), including: 2.016 (U), 1.015/2.017 (U), 6. A01 (U), 2.22 (G), 2.154 (G).
But the most exciting classes I helped to establish and have taught are Fishbot (as part of 6.A01) and Design Electro-mechanic Robotic System (1.015/2.017), two classes emphasizing both theory and hands-on.
These two classes were taught with Dr. Thomas Consi at Ocean Engineering Education Innovation Lab at MIT Sea Grant.
Fishbot - 6.A01
As part of class 6.A01, Mens et Manus (Latin for "Mind and Hand") is for undergraduate freshman of engineering major.
In eight one-hour classes, by building a bio-inspired aquatic robot (a FishBot with various forms), programming its basic motion and, through the iteration of experimentation and reprogramming, optimizing its motion, students can rapidly build an intuitive understanding of the fundamentals of fluid mechanics and how they apply to fish propulsion, as well as gain valuable experience of hands-on experimentation.
We have tested. this class in both 2018 and 2019 Fall semester. Over 50 students have taken the course. We have also documented the class in a paper to IEEE Ocean Conference 2019.
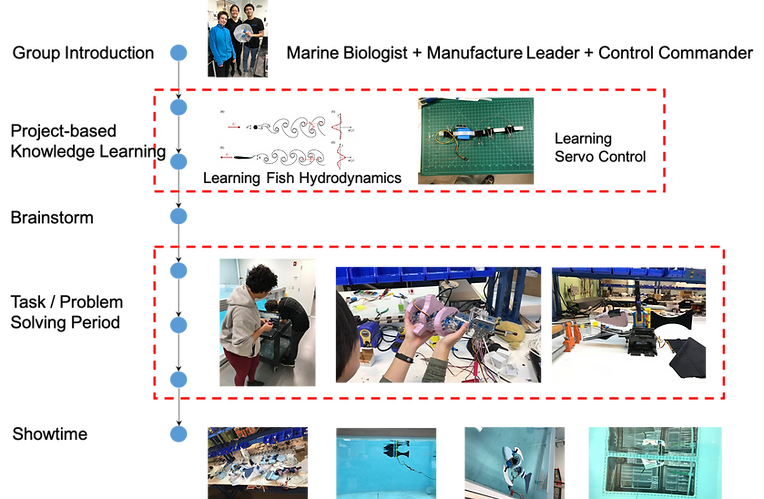
Fig. 01, Course arrangement for Fishbot class
Mov. 01, One of the Fistbots (not-so-successful)
Mov. 02, One of the Fistbots (steady swim + C-start turn)
Design Electro-mechanic Robotic System (1.015/2.017)
From 2018, together with Dr. Thomas Consi and Dr. Gurvan Jodin, we changed the course 1.015/2.017 subjects with a focus on the experience of the hands-on experimentation.
Each group of four students are required to design and construct an autonomous with various functions from scratch in one semester. They are only given an empty hull and the "freedom" to choose whatever they want.
The course again not only focus on the understanding of the theory of the ship maneuverability and control, but also emphasize on the theory implementation into a ship prototype.
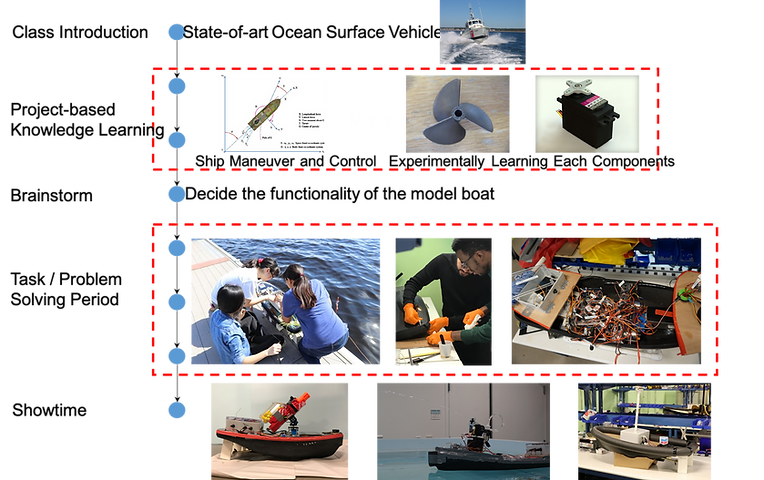
Fig. 02, Course arrangement for 2.017
Mov. 03, Sonar Boat (2.017, 2019), Lab Test
Mov. 04, Sonar Boat (2.017, 2019), Field Test

